<
>
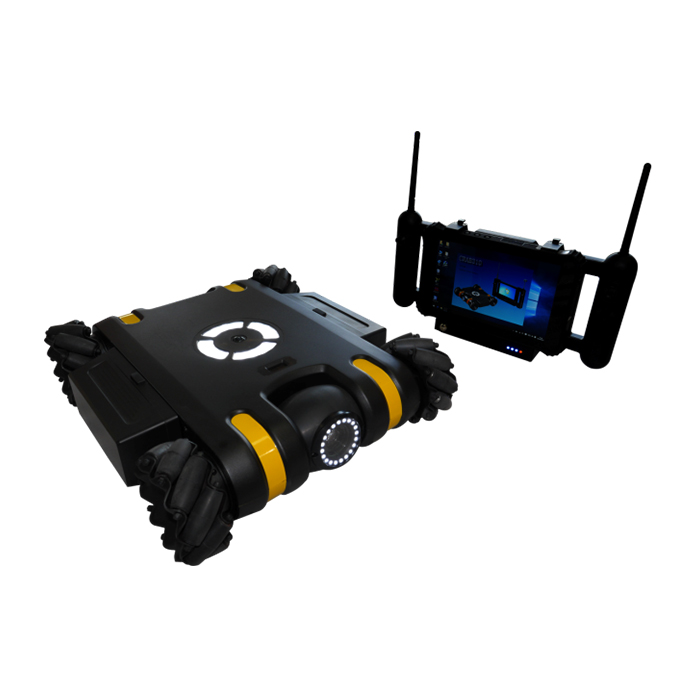
CRAB310全向移动侦察机器人
简 介:
CRAB310车底检查机器人,是一款体积小巧,外形扁平的小型检查机器人,主要用于狭窄、低矮空间的检查作业,亦可扩展加载各种传感器模块对目标区域进行探测。机器人驱动轮采用了麦克纳姆轮结构设计,具备任意方向角度的平移运动能力,运动灵活,操作方便。机器人加载了行车、检查双路视频系统,并具备4G无线回传功能。同时加载了红外探测,可一键启动车底自动巡回检查;控制器小巧轻便,集成度高,具备视屏、图像采集保存功能。是目前市场上唯一的全功能专业车底检查机器人。
相关产品






产品介绍
产品概述
广角观测、图像畸变自动校正
四轮驱动、独立悬挂
全新麦克纳姆轮设计,通过性能更强
一键启动自动巡回检查
十倍光学变焦行车、检查相机;云台0~90°可调
实时图像4G无线回传
集成式平板电脑控制器,军用级平板电脑可拆下独立使用
可拆卸电池、连续工作无限时
规格参数
机器人本体参数
本体项目 | 参数指标 |
外形尺寸 | 382×327×102mm |
车体净重 | ≤7.1kg(含双路电池) |
系统供电 | 24V双路可拆卸电池 |
工作时间 | >4h |
电量显示 | 有 |
行车摄像 | 10倍光学变焦相机 |
观测摄像 | 1200线微型ccd摄像机 |
摄像镜头 | ≥175°大范围广角镜头 |
照明系统 | 双路LED高亮照明 |
工作温度 | -10~+60℃ |
运动速度 | 任意方向≥0.7m/s,无级调速,旋转60°/s |
云台俯仰 | 0°~+90° |
云台速度 | 60°/s |
越障能力 | <30mm微小地面起伏 |
爬坡能力 | <15°缓坡路 |
控制器参数
控制器项目 | 参数指标 |
本体重量 | 1.4kg |
外形尺寸 | 284×210×36mm |
系统供电 | 12v |
显示屏幕 | 8英寸800×1280军用三防平板电脑 |
操纵手柄 | 4位连续自恢复操纵杆 |
工作时间 | >4h |
电量显示 | 有 |
操作距离 | >50m |
传输距离 | >50m |

 营业执照:91330300145116581K
营业执照:91330300145116581K